MSP430之定时器
上一节之所以先介绍了枯燥而且没什么对外效果的时钟部分,就是给本章定时器做铺垫的。不论是MCU还是操作系统内的软定时器,实质上都是时钟+计数器实现的,430的计数器有好几种模式,如果理解了它本质上就是一个简单的计数这个点,所有的模式用起来就得心应手了。
如果一块MCU没有定时器,可不可以用呢?完全可以,前面的那些博客都没有用到定时器。但是,没有定时器,那么和其他一票外设齐全的MCU相比就存在硬伤了,再某些场景下用起来会很不方便。举个例子,前面做了个呼吸灯,按照前面的代码可以顺利作出效果来。现在别人要求,有呼吸灯的同时还要做个其他计算的任务。这个可以做吗?前面我们试过,呼吸灯里面有一个sin的计算,光是计算这个,呼吸灯都卡的一闪一闪的,明显就不行。如果使用定时器,我们可以用定时器更优雅的实现前面的呼吸灯,把CPU解放出来,做其他需要处理的事情。
总结来说,在实际应用中,需要对外部事件进行计数、定时控制、PWM等定制波形输出、脉冲宽度测量、速度测量、周期/频率测量、事件发生时刻的捕捉……,这些测量与控制功能均可借助定时器/计数器来实现。
430定时器介绍
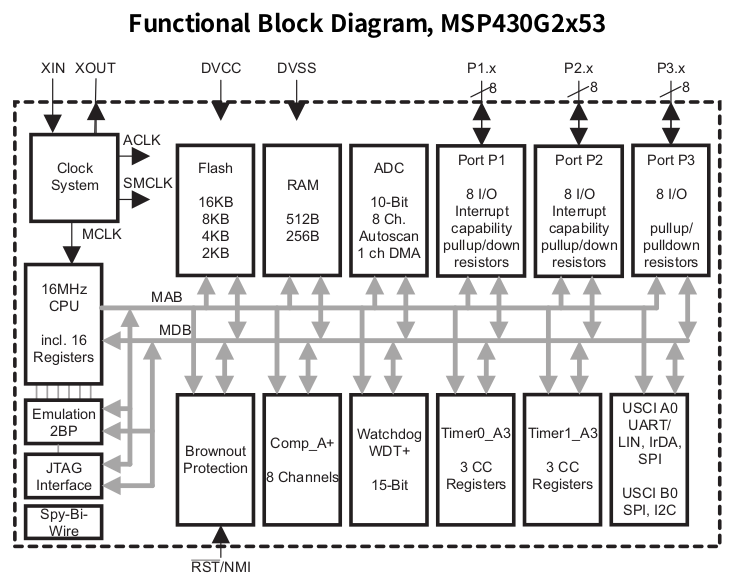
MCU根据型号不同一般会有多个定时器,上面是2553的内部框图,有Timer0和Timer1两个定时器,不过还有个看门狗,也是一个特殊的定时器。(我就碰到过定时器资源实在是不够用了,把看门狗临时拿来当普通定时器用。不过工业级应用肯定不会这么用,硬件看门狗是保证系统可靠性的重要部件,后面可以好好研究一下)。
430内部配备的是一个16位的定时器(位数大小有什么关系?位数越大,可以计的数越多,在CPU频率一样的情况下,一个计数到最大的时间就越长,用起来方便),结构如下图:
定时器结构------时钟源选择
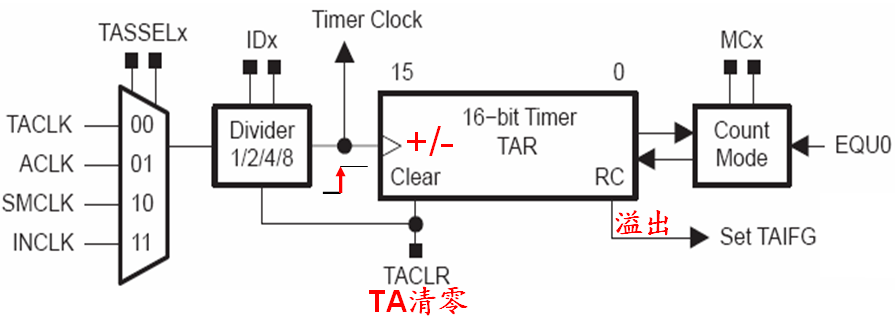
上面时钟部分介绍过一些基本的框图组成元素,所以这张图应该看起来不陌生吧。前面输入是时钟的选择,可以选择不同频率的时钟源,时钟越快,能计时的周期越短,不过计时的精度越高哦。例如,1MHz的时钟输入,计时的精度是1/1000000秒,但计时器一个周期只能计数65535/1000000秒,如果我们用32.768kHz的时钟,我们计时的精度就是1/32768秒,一个周期就是65535/32768秒。(以前做过开关电源PWM波生成,对波形生成的精度要求很高,430最高频率32MHz都达不到,所以用400MHz的FPGA来达到。现在STM32的部分型号,专门为高精度PWM定时器设计,可以达到的精度更高,这里就可以看出来定时器参数的影响作用了)
定时器结构------分频器
再往后面看是分频器,分频器的作用就是把输入的频率一分为二、四、八,降低频率值,前面频率越高精度越高,但周期也越短。周期短有什么弊端?举个例子,如果你有个指示灯想1s闪烁一次,如果CPU主频是1M,16位定时器的周期我们算了是65535/1000000秒,这不到一秒啊。定时器计满之后,我还要写代码记着,再接着定时,直到满1s为止,这样就太麻烦了。
解决办法有三个:
一个是降低定时器的输入时钟频率,例如从高频的SMCLK换成ACLK。
二是提高计数器的位数,如果将16位定时器换成32位,那周期就是2^32/1000000秒,远远够1s了,但430内部固定就是16位了,没法改。
三就是分频了,把计数频率降低的同时,又不影响性能。
将1M主频8分频,已经很接近0.5s了,如果非要单次周期1s的话,就要配合方法一,把输入频率改成低频的32768Hz时钟源即可。
定时器结构------计数器
这个就是定时器的核心,16位的计数器,它的内部实现感兴趣的可以搜索数字电路16位计数器的结构,这个我们可以用分立的基本逻辑单元搭出来。我们这里可以先不关心这么细的,看下外部的几个线,一个是CLEAR清零,左边有个向上的箭头,表示输入波形的上升沿会让计数清零,又从0开始计数。这个信号的来源不是外部引脚输入的,而是来自寄存器,我们把TACLR寄存器用代码(c也好汇编也好)从0改成1,信号就会从0到1有个上升沿(寄存器的模型我们前面也简单介绍过哦)。然后右边,有个溢出脚,通向TAIFG寄存器。这里有两点要提的:
一个是这里的溢出不一定要16位计满,从0数到65535才算溢出,我们可以指定计数的上限,比如我们设定上限是50000,到50000也会触发溢出。上限可设是很方便的,因为65535不能被整除,用起来很麻烦。
二是这里溢出之后,除了将TAIFG置位,从0变成1之外。这个TAIFG上升沿还会触发定时器的中断,不然内部只是偷偷将TAIFG置位,用户是不知道的。(中断前面讲过,翻翻中断源那张表你就能找到定时器的TAIFG中断,当然定时器还不止这一个中断哦,仔细看)。
定时器结构------输出模式选择
这个可以决定输出波形在计数器到达各种特定的中断值后是置1还是归0还是翻转,内部结构具体也不做揣测,预计应该是寄存器控制简单的反相电路实现,但几种模式的区别和用法,介绍完下面的计数器工作模式后,我贴出官方文档各种输出模式下的波形图,大家一看便知其间的区别。
定时器工作模式
定时器的几种工作模式的详细介绍,可以参见官方文档MSP430x2xx Family User's Guide.pdf的第12章节,官方事无巨细地介绍了各种模式下的一切信息,包括各种中断到底再第n个还是n+1个周期触发的等。
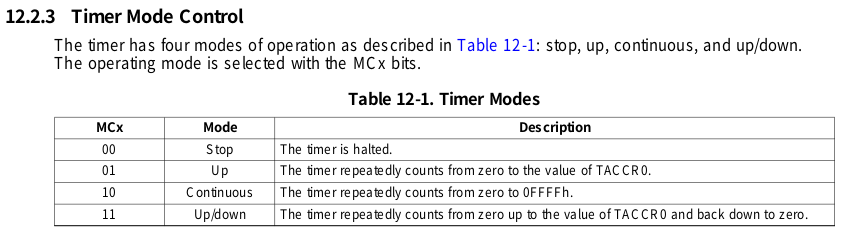
这里从简单快速理解的角度,概要的介绍几种工作模式的特点及典型用法,如果决定使用某种模式并对实现细节很关注的话,建议阅读官方文档。
定时器工作模式------向上计数模式
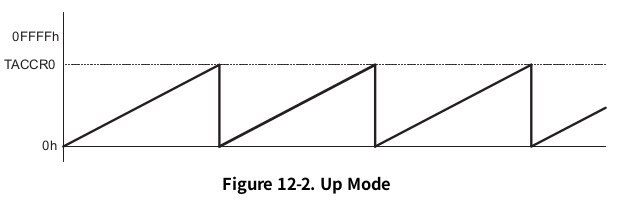
这是最简单的一个模式,存在的意义就是方便我们自定义计数的周期。前面介绍部分的倒数第二段,我们说过要设置一个50000的上限,这样方便我们按整数时间定时。那这里的上限说的就是向上计数模式中的TACCR0,我们写代码TACCR0=50000;就可以设置这个值,当工作在向上计数模式时,计数器就会像图中画的一样从0开始计数,到指定上限后归0重新计数。
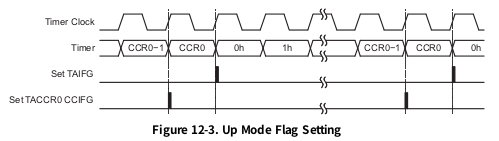
上面这张图描述了计数器计数并出发中断的细节,如果我们要计数50000个周期,我们使用的是TAIFG这个中断,那我们的TACCR0应该是49999而不是50000,因为TAIFG是从0开始到第CCR0个周期触发,是CCR0+1个周期,TACCR0 CCIFG中断才是正好CCR0个周期出发。不过平常我们见到的大部分例程都习惯使用TAIFG中断,所以要注意这里的区别,在CCR0比较大时可能不易察觉出来这个差距,但如果是几十个甚至几个时钟周期,这个差距就比较明显了。官方文档里还介绍了如果在定时器运行的过程中,如果修改定时器模式或者CCR0的值,计数器会如何工作,是立即归零重新计数还是接着计完当前周期,都有介绍。如果你设计的是精密的电源、电机、高压大电流的控制系统,请务必仔细研究官方文档这些细节上的差异。下面的几个模式都是这样去理解,我就只贴图不解释了。
定时器工作模式------持续计数模式
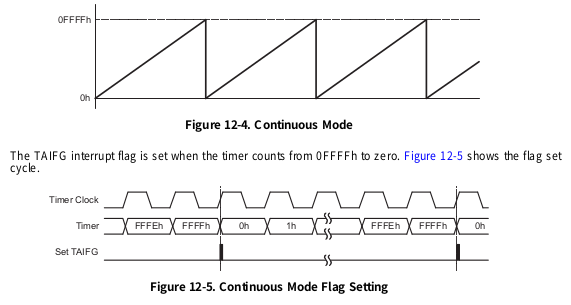
该模式简单粗暴的直接从0计数到65535然后重新计数,并在计数完成后出发TAIFG中断,所以计数周期就是65536个时钟周期。
这种工作模式一般用来固定的产生一些定时频率输出,设置好后可以完全让硬件持续计数,不需要CPU额外干预。
定时器工作模式------向上向下计数模式
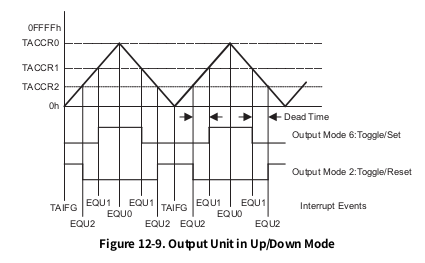
UP DOWN模式可以用在带死区的SPWM波产生上,PWM波就是占空比可变化的方波,SPWM波就是占空比按照正弦规律变化的方波,在开关电源的控制中,SPWM波的两个互相相反的波形上升沿和下降沿需要带有一定的间隔,这就是死区。SPWM波和死区在开关电源、电机控制上有用,建议需要用到时再详细了解,本小结简单介绍下,知道存在这么一个模式即可。
如图中所画,UP/DOWM模式是计数到TACCR0再向下计数到0为一个周期。如果设置了TACCR1和TACCR2,则分别可以在430特定的两个引脚上输出两个对应的波形。TACCR1和TACCR2的差值就可以控制死区的大小。
不过值得一提的是,受限于430的主控频率较低,不能产生频率变化和死区控制很精密的SPWM波,这两点均会影响到开关电源的工作效率和谐波分量,相信如果你真的正在研究开关电源,实验一下也可以知道这个差距,详细的内容,我会在后面开关电源专门的文章中介绍,430也不是万能的,会有其他可替代的解决方案。
定时器工作模式------捕获模式
430的定时器还有一个捕获模式和比较模式之分,比较模式就是上面讲的东西,捕获模式则是另一种430支持的工作模式。简单讲可以这么理解,比较模式是定时器跑到一定的周期数,触发一个中断进行相应处理。而捕获模式则是反过来,定时器正常计数,外部的输入信号来触发定时器停止计数。
由输入信号触发不就是相当于捕获了外部信号的变化吗?这就是捕获模式的名称由来。这个功能可以用来测量两个事件的时间间隔、测量信号频率,测量电机的转速等等。
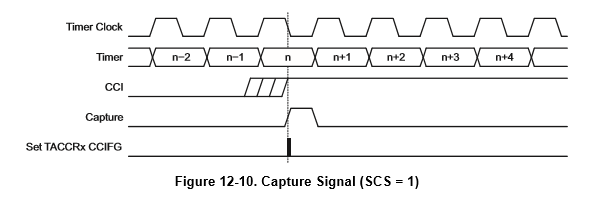
上图是430捕获模式下的时序图,Capture表示输入信号,当设置上升沿捕获的时候,输入信号上升沿会触发CCIFG中断,并把当前的计数器值N读到寄存器中。读取N我们就能知道定时器计时的时间长度了。
用法示例
简单的周期定时
产生周期为1s的定时器中断,在中断中翻转板上的红灯状态。
void TimerWave()
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if (CALBC1_1MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_1MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_1MHZ;
P1DIR |= BIT0; // P1.0 output
CCTL0 = CCIE; // CCR0 interrupt enabled
CCR0 = 50000;
TACTL = TASSEL_2 + MC_2; // SMCLK, contmode
}
// Timer A0 interrupt service routine
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=TIMER0_A0_VECTOR
__interrupt void Timer_A (void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(TIMER0_A0_VECTOR))) Timer_A (void)
#else
#error Compiler not supported!
#endif
{
counter++;
if(counter%20 == 0)
P1OUT ^= BIT0;
}
PWM波产生与占空比调节
产生周期为100K,占空比为30%的PWM波
void TM1()
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if (CALBC1_1MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_1MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_1MHZ;
P1DIR |= BIT2; // P1.2 and P1.3 output
P1SEL |= BIT2; // P1.2 and P1.3 TA1/2 options
CCR0 = 20-1; // PWM Period
CCTL1 = OUTMOD_7; // CCR1 reset/set
CCR1 = 6; // CCR1 PWM duty cycle
TACTL = TASSEL_2 + MC_1; // SMCLK, up mode
CCTL0 &= ~CCIE;
}
较高频率高精度PWM波产生
产生周期为400K,占空比为50%的方波
void TM2()
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if (CALBC1_16MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_16MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_16MHZ;
P1DIR |= BIT2; // P1.2 and P1.3 output
P1SEL |= BIT2; // P1.2 and P1.3 TA1/2 options
CCR0 = 80-1; // PWM Period
CCTL1 = OUTMOD_7; // CCR1 reset/set
CCR1 = 40; // CCR1 PWM duty cycle
TACTL = TASSEL_2 + MC_1; // SMCLK, up mode
CCTL0 &= ~CCIE;
}
看门狗作为普通定时器用法
利用G2系列单片机片上看门狗定时器,产生0.25s周期的中断,翻转板上绿灯状态
void WDT()
{
if (CALBC1_1MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_1MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_1MHZ;
WDTCTL = WDT_MDLY_32; // Set Watchdog Timer interval to ~30ms
IE1 |= WDTIE; // Enable WDT interrupt
P1DIR |= BIT0; // Set P1.0 to output direction
}
// Watchdog Timer interrupt service routine
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=WDT_VECTOR
__interrupt void watchdog_timer(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(WDT_VECTOR))) watchdog_timer (void)
#else
#error Compiler not supported!
#endif
{
P1OUT ^= BIT6; // Toggle P1.0 using exclusive-OR
}
组合:按键中断+定时器
上述功能1、2、3、4通过板上按键依次切换,按键通过扫描或者IO口中断实现均可
#include "msp430g2553.h"
unsigned int counter = 0;
unsigned char state = 0;
void TimerWave()
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if (CALBC1_1MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_1MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_1MHZ;
P1DIR |= BIT0; // P1.0 output
CCTL0 = CCIE; // CCR0 interrupt enabled
CCR0 = 50000;
TACTL = TASSEL_2 + MC_2; // SMCLK, contmode
}
void WDT()
{
if (CALBC1_1MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_1MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_1MHZ;
WDTCTL = WDT_MDLY_32; // Set Watchdog Timer interval to ~30ms
IE1 |= WDTIE; // Enable WDT interrupt
P1DIR |= BIT0; // Set P1.0 to output direction
}
void TM1()
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if (CALBC1_1MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_1MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_1MHZ;
P1DIR |= BIT2; // P1.2 and P1.3 output
P1SEL |= BIT2; // P1.2 and P1.3 TA1/2 options
CCR0 = 20-1; // PWM Period
CCTL1 = OUTMOD_7; // CCR1 reset/set
CCR1 = 6; // CCR1 PWM duty cycle
TACTL = TASSEL_2 + MC_1; // SMCLK, up mode
CCTL0 &= ~CCIE;
}
void TM2()
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if (CALBC1_16MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_16MHZ; // Set DCO to 8MHz
DCOCTL = CALDCO_16MHZ;
P1DIR |= BIT2; // P1.2 and P1.3 output
P1SEL |= BIT2; // P1.2 and P1.3 TA1/2 options
CCR0 = 80-1; // PWM Period
CCTL1 = OUTMOD_7; // CCR1 reset/set
CCR1 = 40; // CCR1 PWM duty cycle
TACTL = TASSEL_2 + MC_1; // SMCLK, up mode
CCTL0 &= ~CCIE;
}
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
P1DIR |= BIT0 + BIT6;
P1OUT &= ~(BIT0 + BIT6);
P1DIR &= ~BIT3;
P1REN |= BIT3;
P1OUT |= BIT3;
P1IES |= BIT3;
P1IE |= BIT3;
P1IFG = 0;
//while(1);
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupt
}
// Timer A0 interrupt service routine
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=TIMER0_A0_VECTOR
__interrupt void Timer_A (void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(TIMER0_A0_VECTOR))) Timer_A (void)
#else
#error Compiler not supported!
#endif
{
counter++;
if(counter%20 == 0)
P1OUT ^= BIT0;
}
// Port 1 interrupt service routine
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=PORT1_VECTOR
__interrupt void Port_1(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(PORT1_VECTOR))) Port_1 (void)
#else
#error Compiler not supported!
#endif
{
if(P1IFG&BIT3)
{
__delay_cycles(10000);
if((P1IN&BIT3) == 0)
{
state++;
switch(state)
{
case 1:
TimerWave();
break;
case 2:
WDT();
break;
case 3:
TM1();
break;
case 4:
TM2();
break;
default:break;
}
if(state == 4)
{
state = 0;
}
}
}
P1IFG = 0;
}
// Watchdog Timer interrupt service routine
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=WDT_VECTOR
__interrupt void watchdog_timer(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(WDT_VECTOR))) watchdog_timer (void)
#else
#error Compiler not supported!
#endif
{
P1OUT ^= BIT6; // Toggle P1.0 using exclusive-OR
}